Flow360 適用事例
Flow360による適用事例です。
XV-15 ティルトローターのCFD事例
2020年には世界で4,030万便の運航が予測されていたにもかかわらず、飛行機には大きな制約があります。離陸するためには、飛行機は滑走路上で加速し、揚力を発生させ、機体を浮かせるのに必要な速度に達しなければなりません。この制約が、固定翼ではなく回転するローターブレードを使って揚力を生み出すヘリコプターの開発を促しました。これにより、ヘリコプターは長い滑走路を必要とせず、垂直に離着陸することが可能となったのです。
しかしながら、ヘリコプターには短い航続距離や低速といった制約があります。そこで、新しいタイプの航空機であるティルトローターが開発されました。ティルトローターは、ヘリコプターのホバリングや垂直離着陸(VTOL)の能力に加え、飛行機の速度や航続距離を兼ね備えています。
名前が示す通り、ティルトローターは固定翼の先端に取り付けられた傾斜可能なローターを利用します。垂直飛行中は、ローターの回転面が水平になり、ヘリコプターと同様の方法で揚力を生み出します。飛行速度が上がるにつれて、ローターは徐々に前方に傾き、巡航時には回転面が垂直になります。このとき、ローターはプロペラとして推力を生み出し、固定翼は飛行機と同様に揚力を生成します。
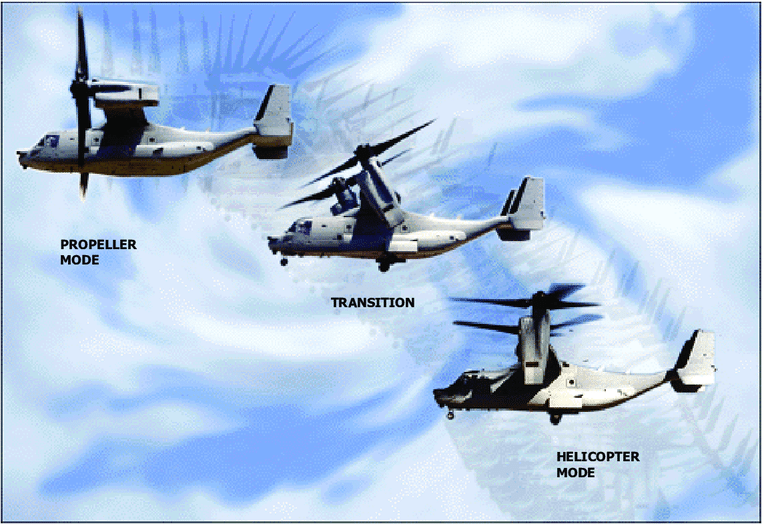
V-22 ティルトローターがヘリコプターモードから飛行機モードへ移行する様子
CREDIT: Radhakrishnan Mylapore, Anand (2006)
この仕組みにより、航空機は飛行中にヘリコプターモードと飛行機モードを切り替えることが可能となり、ヘリコプターよりも高高度かつ高速での飛行を実現できます。
これらの性能は過去に多大な投資を集め、1960年代後半にはNASAがベル・ヘリコプター社と共同で Bell XV-15 を開発しました。この機体は、今日に至るまで多くのVTOL(垂直離着陸)航空機の基盤となっています。
ティルトローターのCFD
ヘリコプターモードと飛行機モードの両方で効率的に運用するため、XV-15のローター回転翼は大きなねじり角と高いソリディティ(ローターの面積比)、さらに小さなローター半径を備えた複雑な形状となっています。これに加え、運用条件の幅が非常に広いため、CFDでティルトローターのローター回転翼を正確にモデル化することは極めて困難です。
これまでXV-15のホバリングおよび飛行機モードを解析した研究はいくつか行われましたが、いずれもナビエ–ストークス方程式の全領域数値シミュレーションに基づくものでした。しかし、実機スケールのXV-15について、ホバリングおよび推進/降下を伴う前進飛行におけるヘリコプターモードと飛行機モードを包括的に数値解析した研究はこれまで存在しません。Flow360ソルバーの精度と性能を検証するため、Flexcomputeはこの研究を実施しました。
モデル形状
XV-15のローターは3枚の独立したローターブレードで構成されており、それぞれのブレードは5種類の NACA 6系列翼型断面から成っています。実機スケールのXV-15ローターの形状特性をもとにEngineering Sketch Padにより形状ファイルが作成されました。
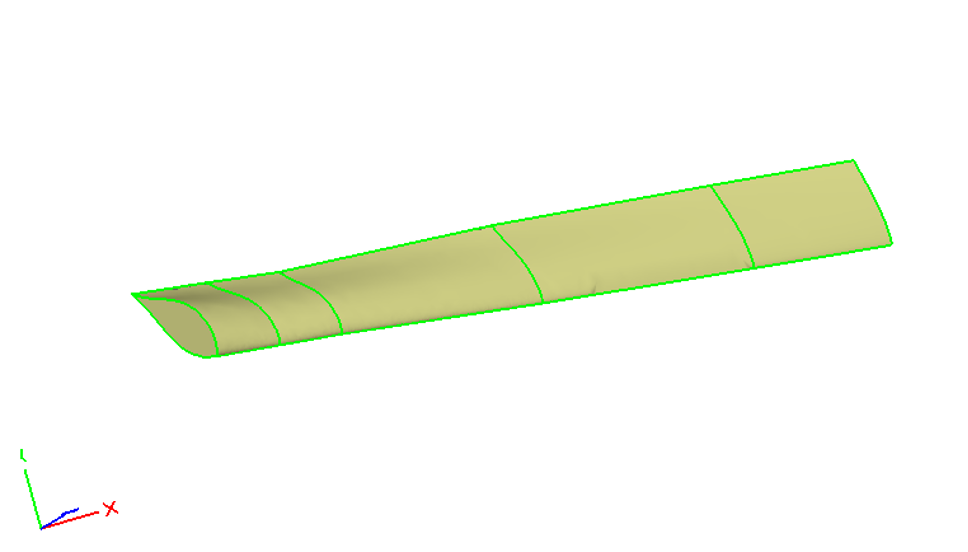
従来型のヘリコプターブレードとは異なり、ティルトローターブレードは複雑な形状を持ち、5種類のNACA翼型断面で構成されています
メッシュ作成
航空機全体およびローターブレード周囲の流れを正確に捉えるため、マルチブロック非構造格子法が採用されました。
解析領域は以下の2つのブロックに分割されました:
1. 遠方ブロック:固定領域として機能
2. 近傍ブロック:回転領域として機能し、3枚のローターを含む
遠方ブロック(黄色)は、設定した境界条件下で独立した解が得られるよう十分に大きく設計されました。
近傍ブロックは、円筒形のオフボディメッシュ(青)とブレード(緑)を含む3つの円筒形ボディーフィットメッシュ(オレンジ色)から成る4つの要素で構成されています。これにより、ブレードの集合角0〜18度の範囲でCFD解析を行う際、円筒形ボディフィットメッシュを逐次再生成するが可能になります。
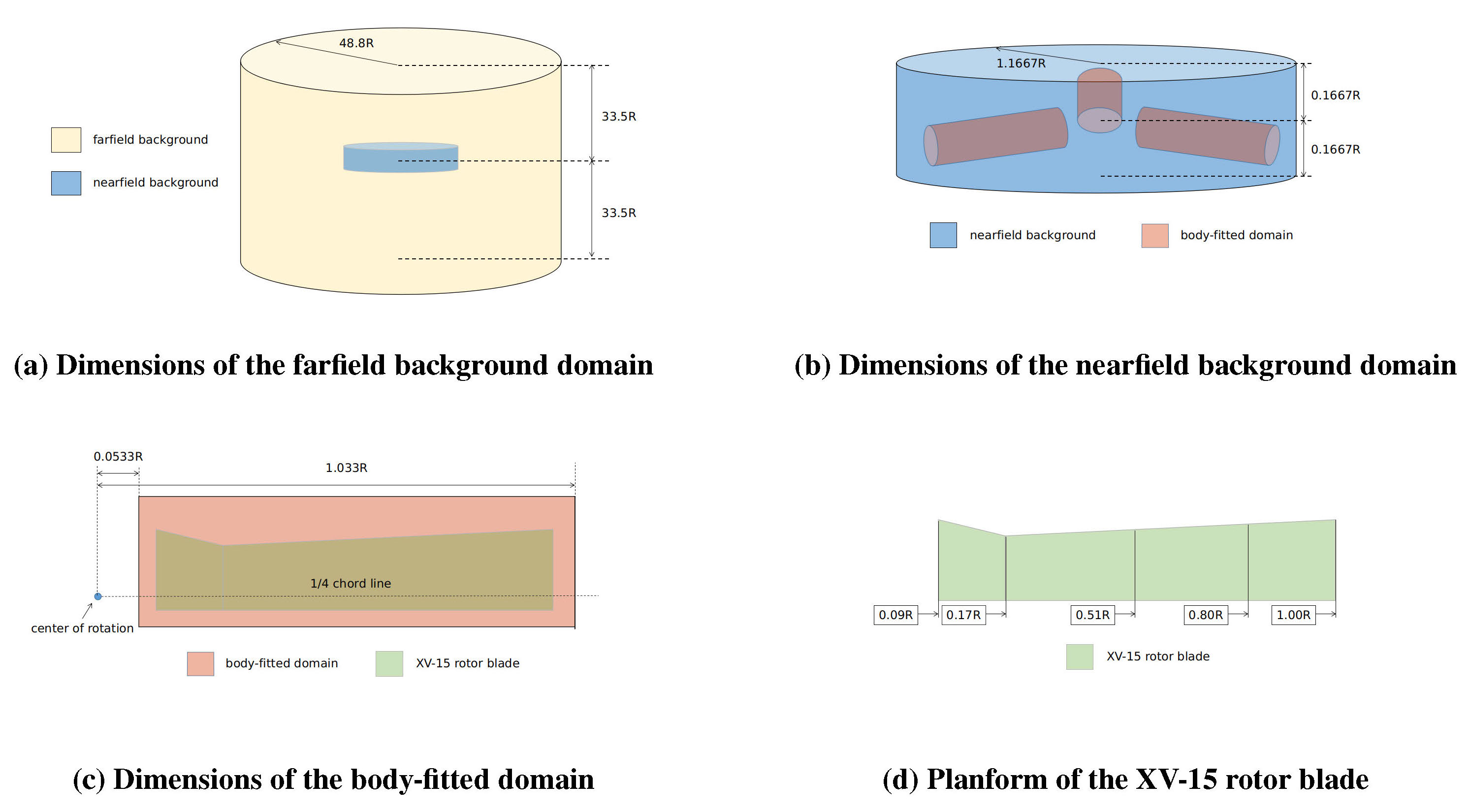
解析領域が複数のブロックに分割された図
メッシュ生成プロセスは、まず円筒形ボディフィットメッシュを作成することから始まり、その後軸方向に回転させることで他の2つのボディフィットメッシュを生成しました。これらはオフボディメッシュと統合され、重複するノードを整理することで、近傍ブロック用の一体化メッシュが作成されます。
全体メッシュは、解像度と計算時間の最適なバランスを実現するために、ヘキサ、テトラ、プリズム、ピラミッドセルの混合で構成されます。さらに、特に複雑な領域、例えばブレード近傍の粘性境界層では、40層以上のヘキサセルを用いて局所的に高解像度化されています。
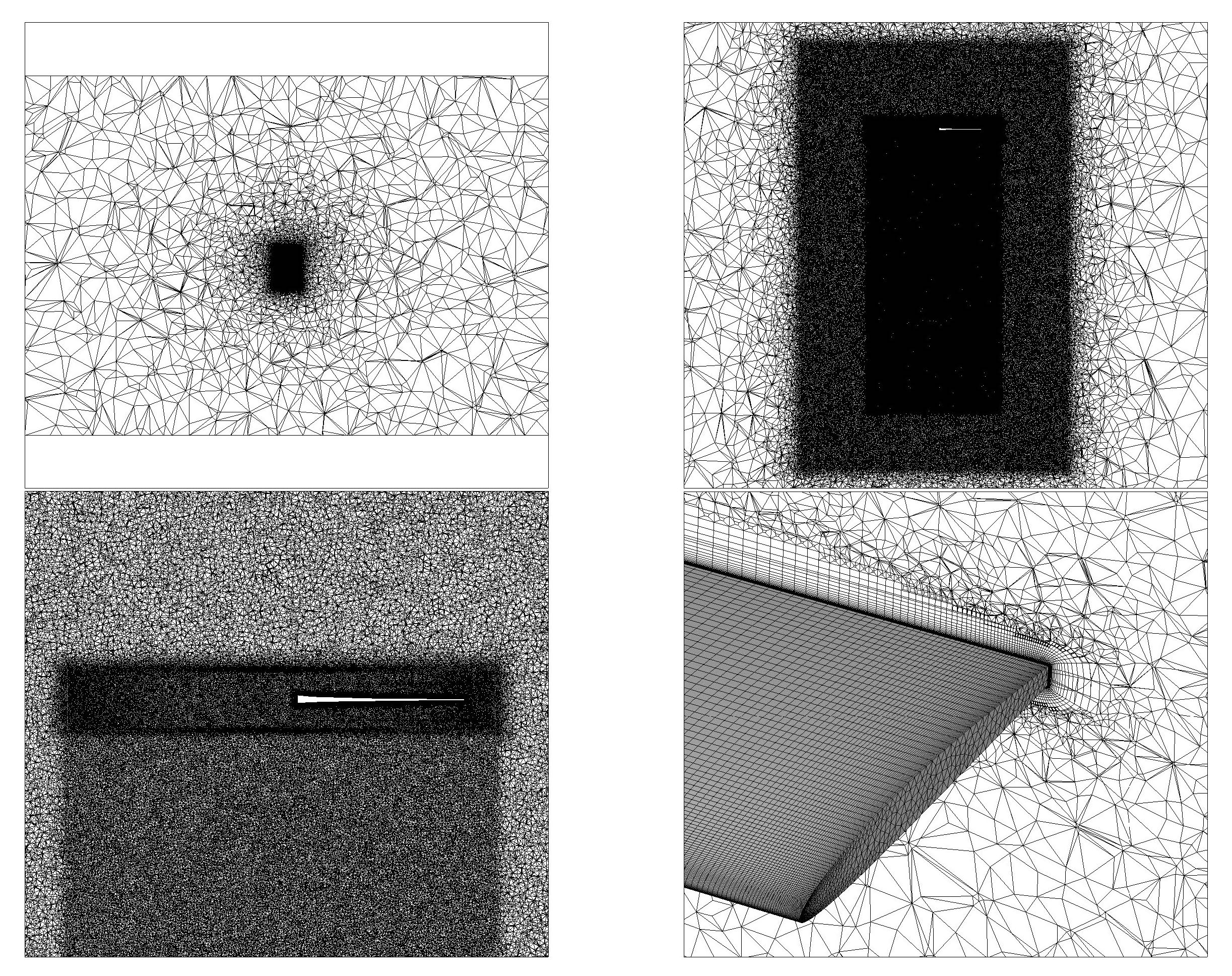
ブレード先端付近(右下)の体積メッシュおよび表面メッシュの断面表示
回転ブレードをモデル化するために、近傍ブロックは静止している遠方ブロック内で回転する必要があり、そのためスライディングメッシュインターフェースを解く必要があります。各タイムステップごとに、回転メッシュ上のレシーバノードは静止メッシュ上の最も近い2つのドナーノードを検出します。レシーバノードの解は、これら2つのドナーノードの解から線形補間され、その後次のタイムステップで同じプロセスが繰り返されます。
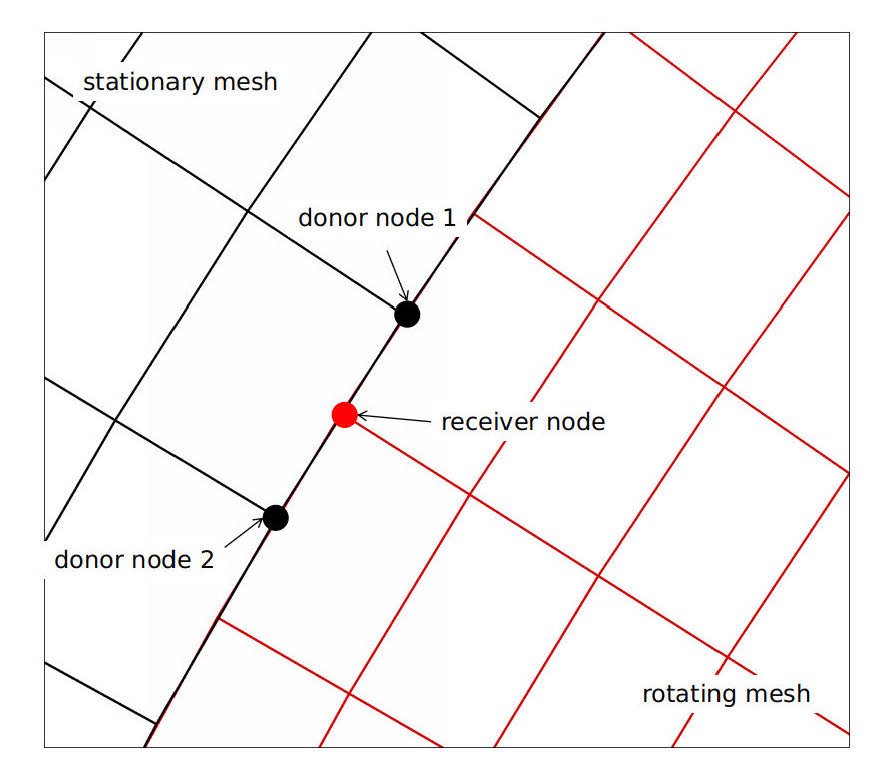
回転メッシュ上のレシーバノードの解は、静止メッシュ上のドナーノードの解から線形補間されます
CFD結果
本研究のCFDシミュレーションでは、Detached Eddy Simulation(DES)手法を用い、Spalart–Allmaras(SA)乱流モデルと組み合わせて実施しました。解析対象には、ブレード全体および断面ごとの荷重、表面圧力係数、摩擦係数、さらに流れ場の詳細分布などが含まれます。Flow360ソルバーの精度を検証するために、これらの結果を過去のCFD研究や利用可能な場合にはNASAによる実機スケール風洞試験の実験データと比較しました。
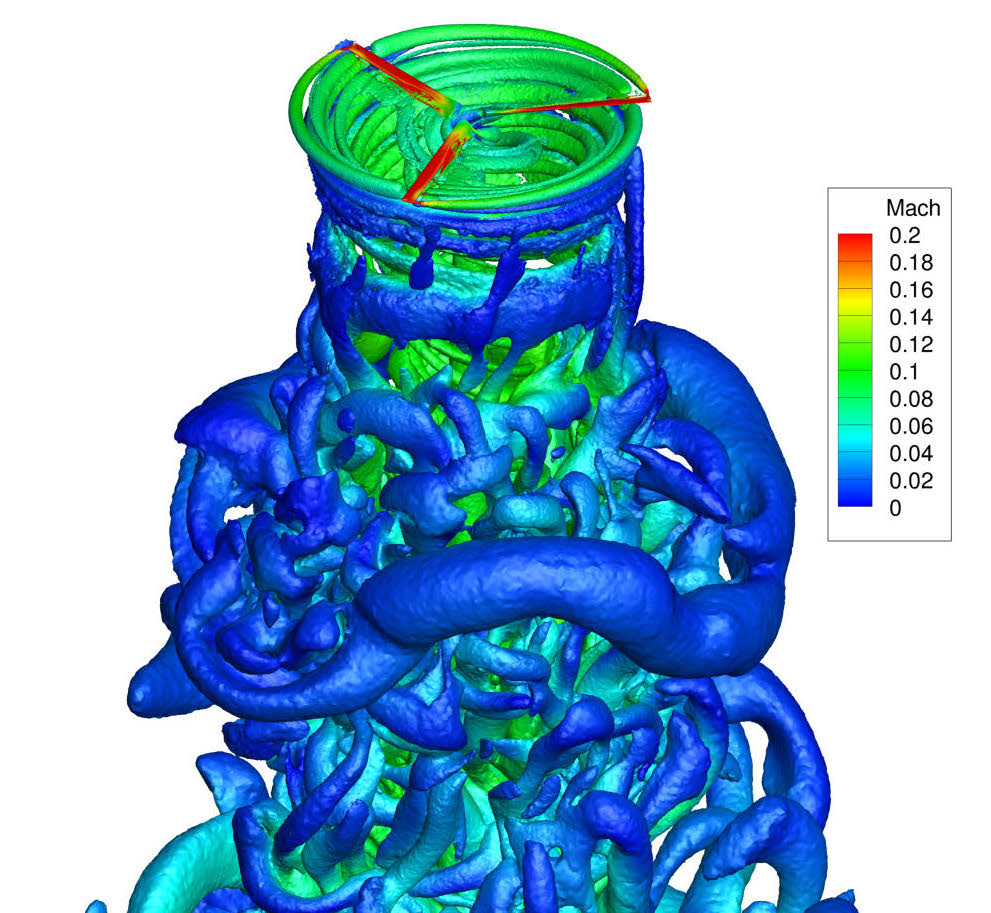
Q-criterion を用いたホバーモードにおける XV-15 の後流可視化
ブレード全体の荷重
ヘリコプターモードのホバリング飛行における推力係数(CT)の関数としてのメリット係数(FoM)およびトルク係数(CQ)を、3種類の実験データと比較しました。その結果、いずれの場合においても Flow360 の解析結果は風洞実験の測定値と強い相関を示しました。
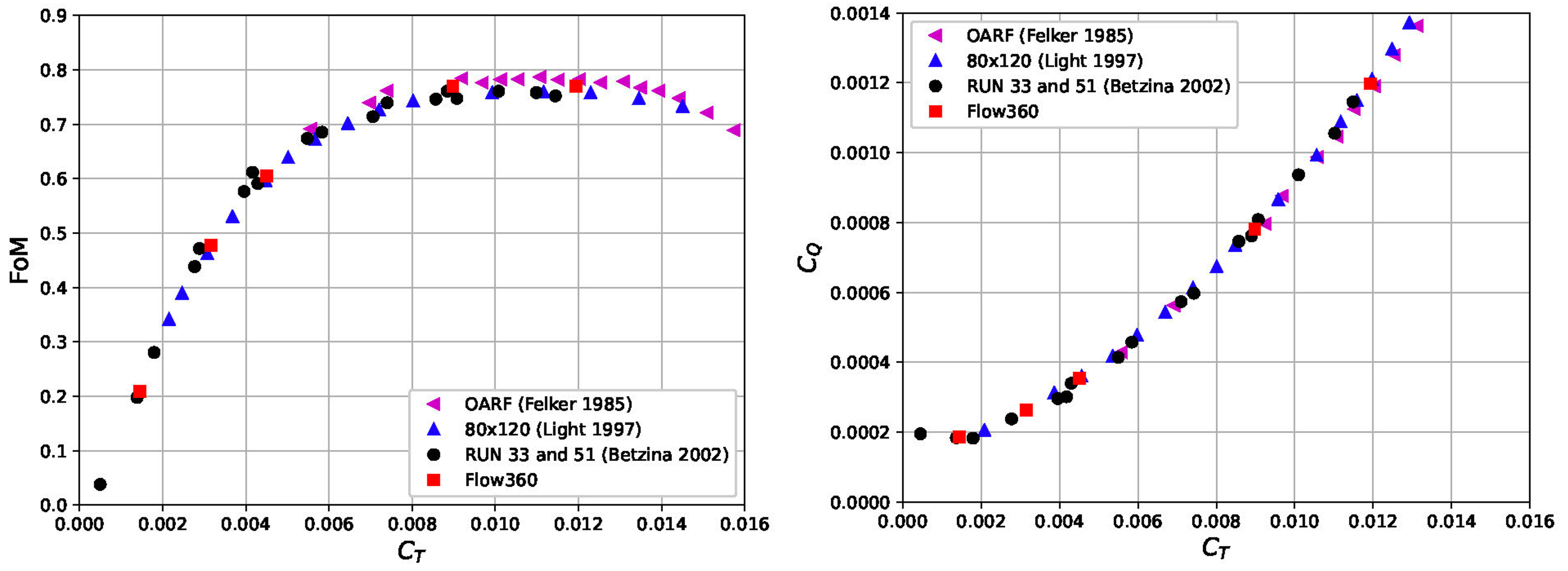
ヘリコプターモードのホバリング飛行における推力係数(CT)の関数としてのメリット係数(FoM)およびトルク係数(CQ)
前進飛行におけるヘリコプターモードでの CQ と CT を解析するために、推進および降下を伴う前進飛行条件の範囲を再現する目的で、シャフト角を変化させました。実験データと比較すると、予測されたローター性能は類似した傾向を示しましたが、相対誤差は 4〜14%でした。これらの CFD 結果をさらに検証するための、より精密な圧力分布や摩擦抵抗に関する実験データが不足しているため、今後は格子解像度および時間積分に関する検討を行い、これらの差異の原因を特定する予定です。
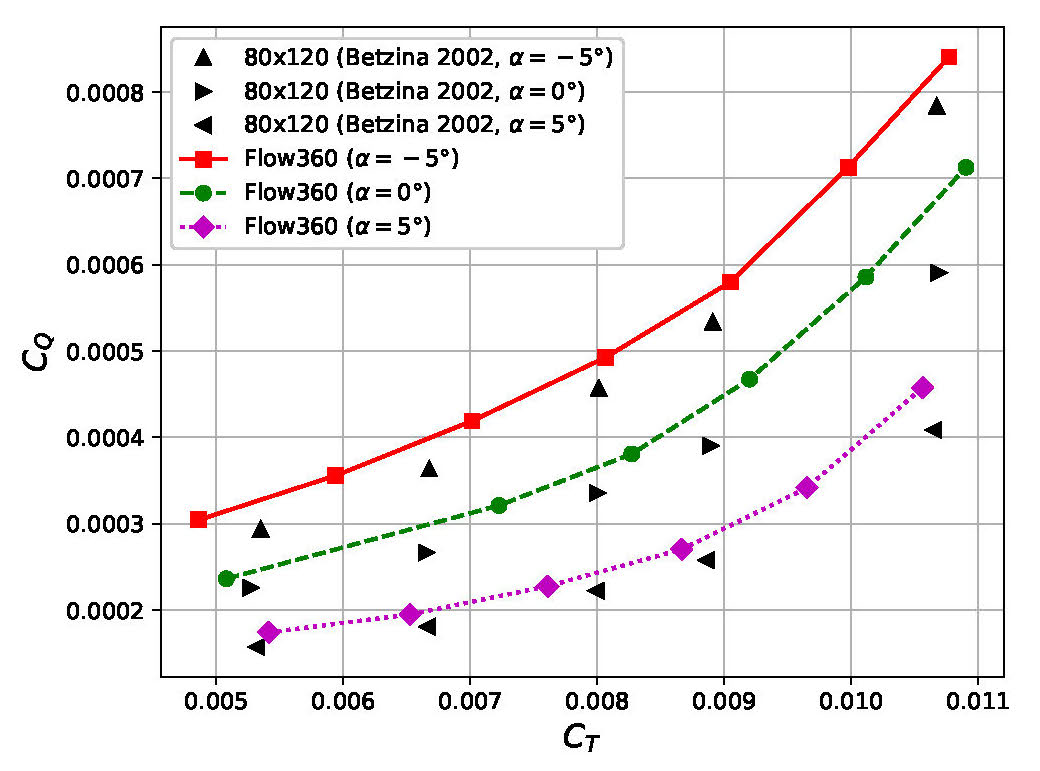
ヘリコプターモードの前進飛行におけるトルク係数(CQ)と推力係数(CT)の関係
飛行機モードにおいては、さまざまなコレクティブピッチ角に対してシミュレーションを実施しました。その結果、既往の CFD 研究および利用可能な実験データと良好な相関を示しました。
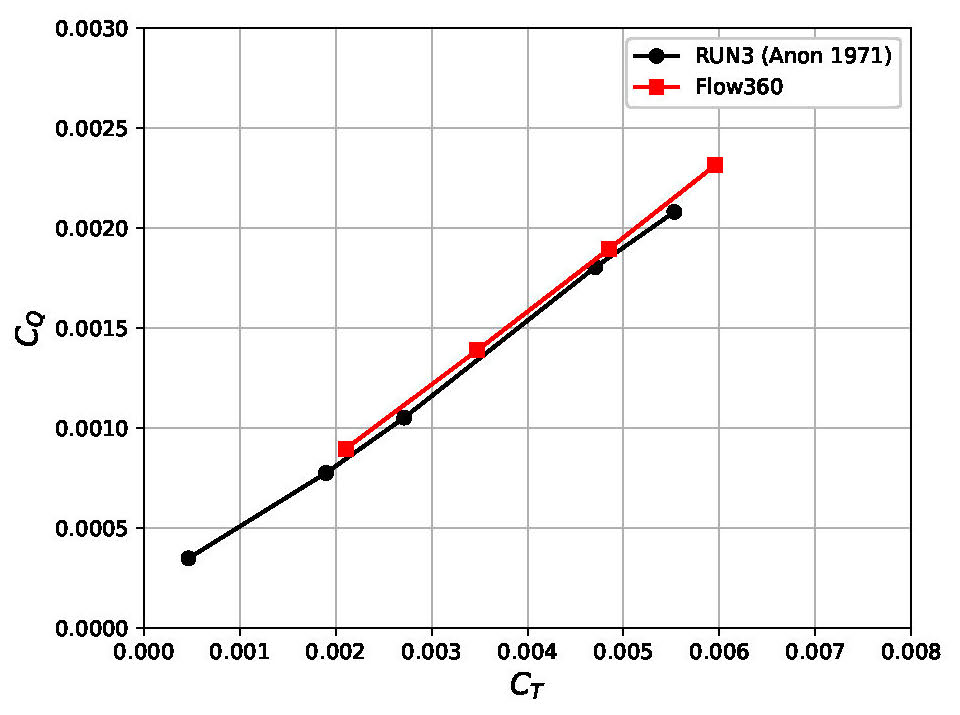
飛行機モードにおけるトルク係数(CQ)と推力係数(CT)の関係
圧力分布の結果
さらに、Flow360のより詳細な物理現象を捉える予測能力を検証するために、ホバリング飛行中のブレード表面圧力分布も調査しました。実験データがないため、比較には過去のCFD研究(OVERFLOW2およびHMB3コードを使用したもの)が用いられました。
コレクティブピッチ角10度に対して、3つの半径方向ステーションを選定し、それぞれの半径ステーションにおける局所回転速度に基づいて表面圧力係数(CP)を計算しました。その結果、いずれの場合も、Flow360の結果はOVERFLOW2およびHMB3の結果と良好に一致しました。
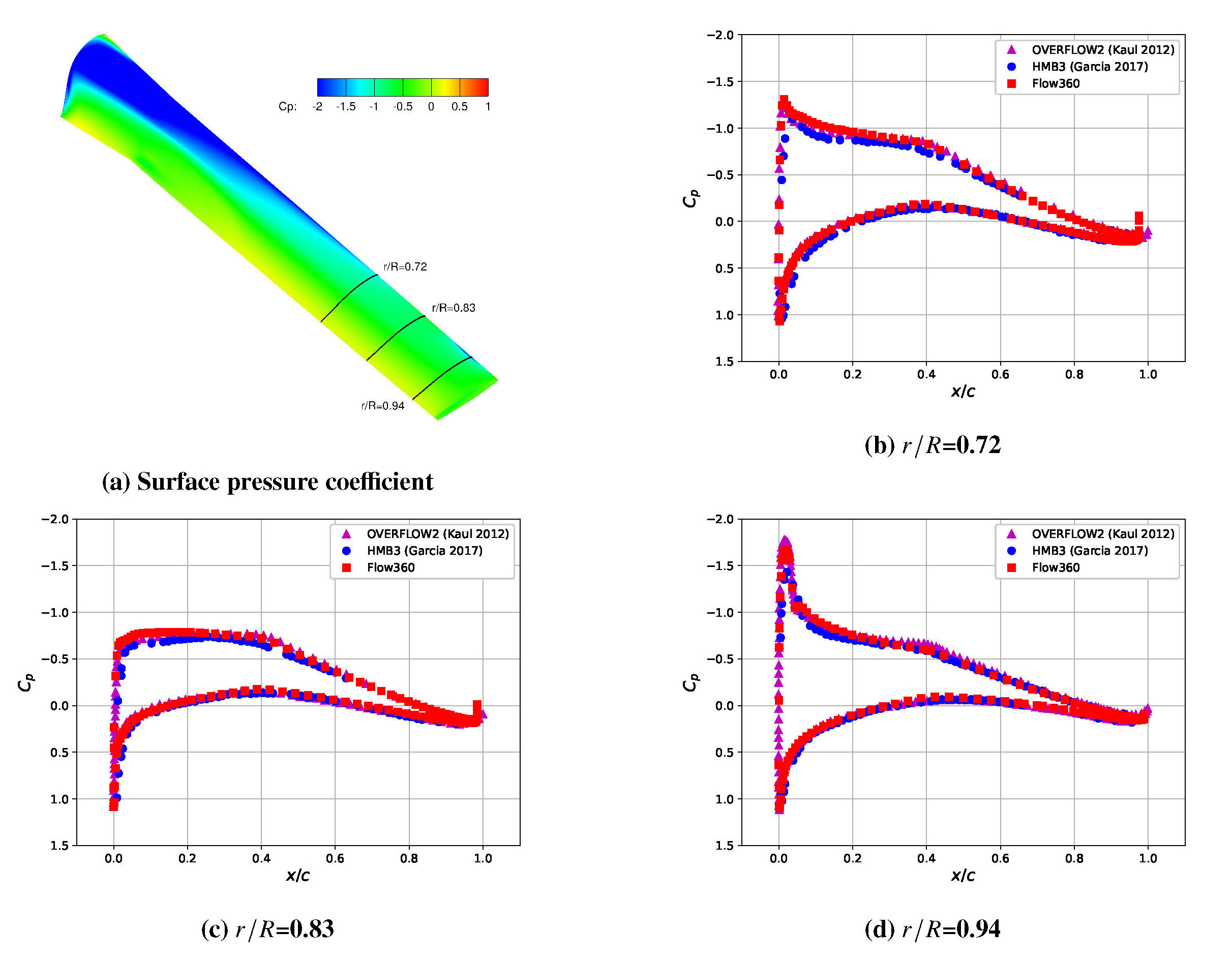
コレクティブピッチ角10度における予測表面圧力係数(CP)
本研究では、Flexcompute社のFlow360を用いて、ホバリング飛行および前進飛行のヘリコプターモードならびに航空機モードに関する詳細なCFD解析を実施しました。実験データや過去のCFD研究との詳細な比較の結果、Flow360はヘリコプターモードのホバリング飛行や航空機モードのローター回転翼性能を正確に予測できることが確認されました。さらに、前進飛行ヘリコプターモードにおけるより詳細な現象の予測能力を検証するための追加調査を実施する予定です。